01/02/2024: Round About Four Dimensions – Exploring the Unknown
Arduino c++ Python Robotics
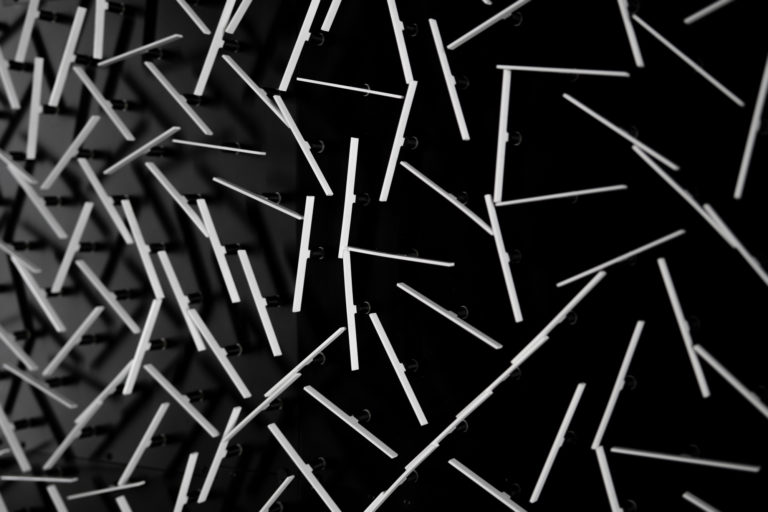
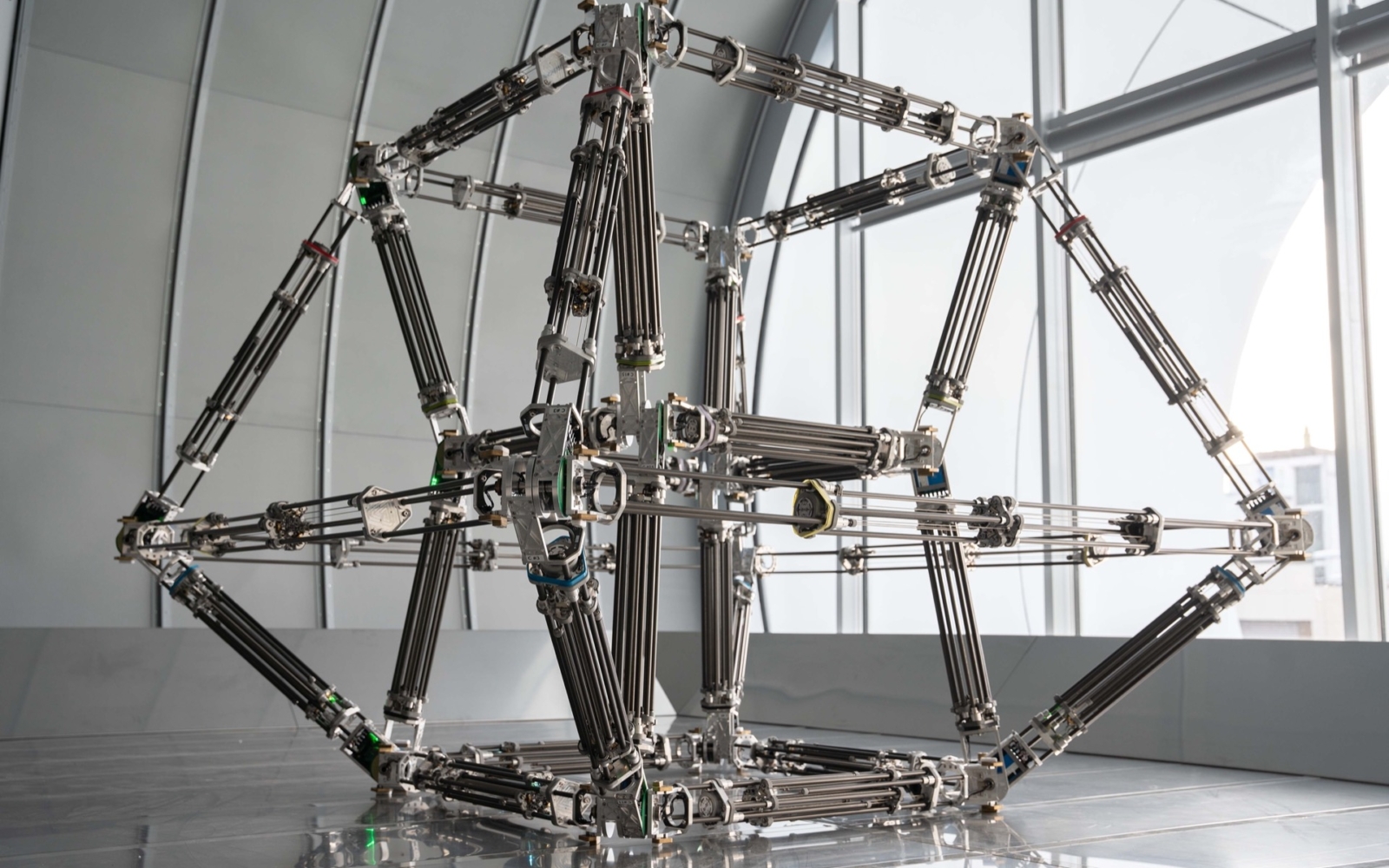
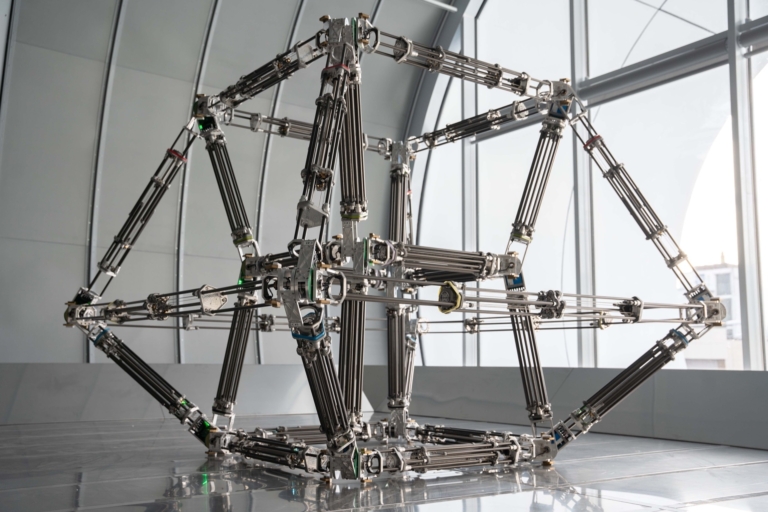
Created by Julius von Bismarck & Benjamin Maus, Round About Four Dimensions sculpture represents a “hypercube”, “four-cube” or “tesseract”, often cited in mathematical and physical theories to illustrate concepts beyond three spatial dimensions.