One of the my favorite things about creativeapplications.net has always been the small tags one can find beneath the name of an application indicating among other things, the technology used to create it. That little nod to the process and to all the work that went into creating the libraries and techniques that an artist or designer uses helps not only contextualize the work but it also helps give recognition to everyone who has contributed their time and expertise to building tools for creative expression in code. Figuring that some of the readers might be interested in learning a little more about these frameworks I've put together a quick walk-through of how to connect up two of those tools that one so often sees attached to the names of the projects profiled here: openFrameworks and Arduino.
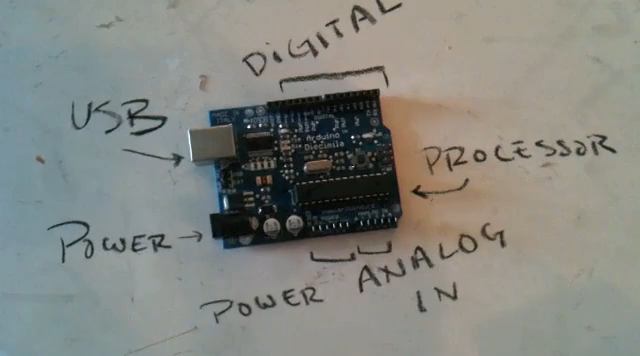
Many of you are probably familiar with at least the basics of the oF and Arduino projects, but for anyone not familiar here's the briefest of brief explanations: oF is a C++ library for creative coding that helps artists and designers quickly create powerful applications for Windows, Linux, or OSX. Arduino is both a library and a microprocessor platform for prototyping and tinkering with microprocessors and embedded computing that simplifies the process of connecting and programming a fantastic range of components and electronic devices. Connecting the two of them allows you to create applications that not only use processing-heavy libraries like the OpenCV library for Computer Vision (more on that later) but also connect to and communicate with electronics out in the physical world. In this tutorial we'll be using motion tracking in an openFrameworks application to control servo motors connected to an Arduino board.




21 comments on “Arduino + Servo + openCV Tutorial [openFrameworks]”