The AADRL is a post-professional MArch (Architecture & Urbanism) graduate design programme at the Architectural Association School of Architecture, in London. Led by Theodore Spyropoulos, it has four research labs that respond to an umbrella agenda that the team set for a period of 3-4 years. Most recently they have been working on a theme of 'Behavioral Complexity', which explores design that is proto-typical, scenario driven and examines behaviours through design enquiry. A feature of this research agenda between the four labs is examining robotics within architecture. They have two studios that are exploring 3D printing at the scale of buildings, one augmenting robotic arms by developing custom end effectors and the other exploring drones and swarm printing and finally the fourth studio is looking at parametric approaches towards kinetic architecture.
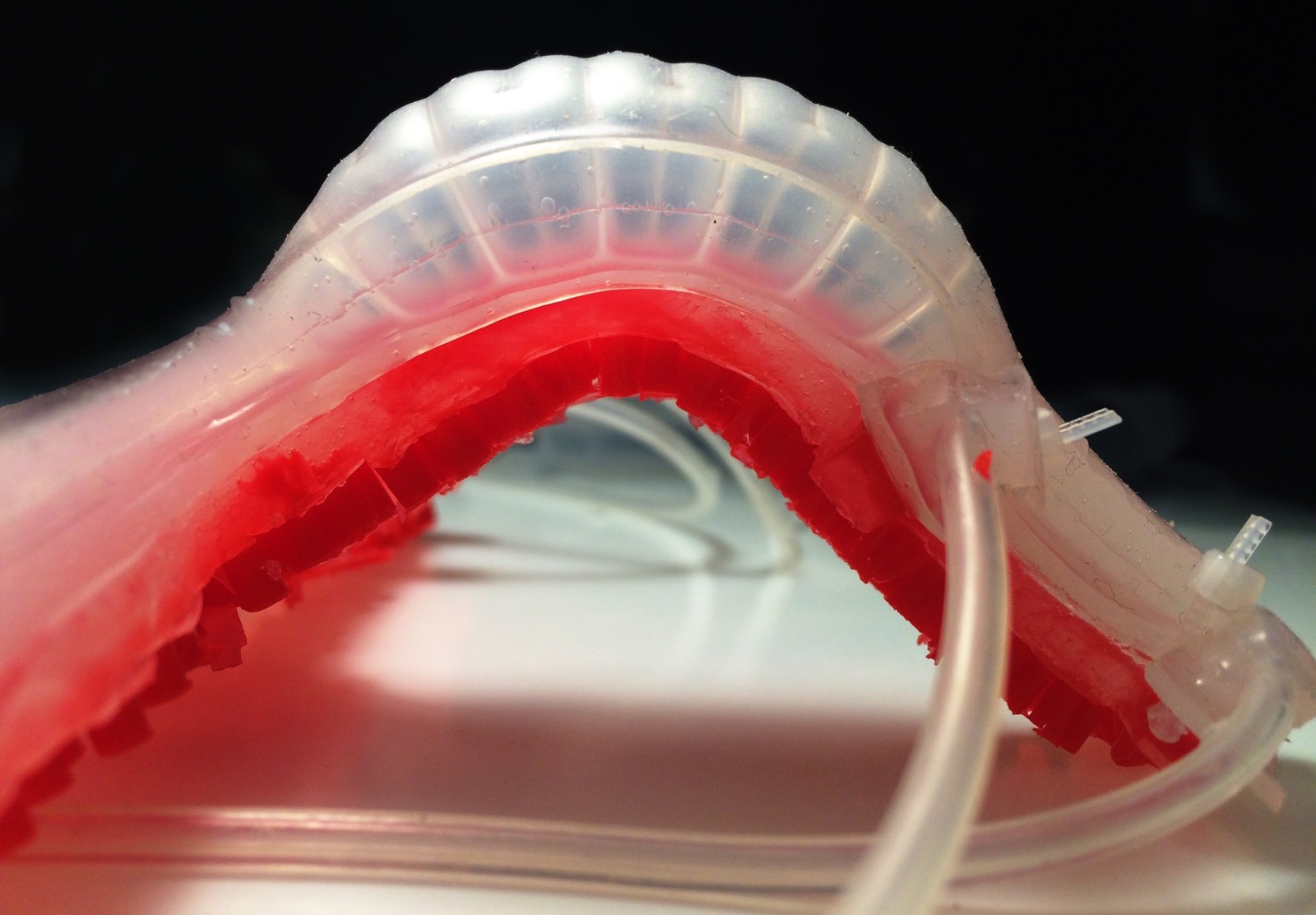
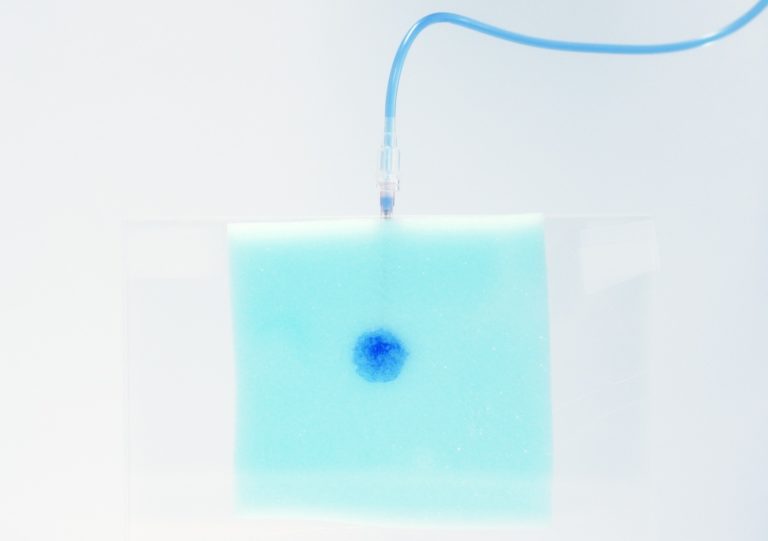
The following is the work from AADRL Spyropoulos Design Lab, which has been exploring behavior based design systems that are self-aware, mobile, and self-structure and assemble. The research explores high population mobility agents that evolve design that moves beyond finite conceptions of space towards one that co-evolves and adapts. The research looks at developing strategies of intelligent design units that through organisation develop body plans that afford new behaviours to emerge. An example of this is OWO project below which as a singular unit is conceptualised as a unit that through embedded pneumatics allows the unit to expand / contract, curl, and roll. With respect to mobility as an individual unit it can roll in its mobility mode, but for example a unit connects to two other units then the body plan allows for a tripod configuration, which allows the creature to walk.



2 comments on “AADRL – Behavioural Complexity; Mobile, Self-Aware and Self-Assemble”