Created as a collaboration between Scandinavian Design Group, Abida, Intek & Ctrl+N, Breaking the Surface is a conceptual installation created for the 10 year anniversary of the Norwegian oil company Lundin Norway. It will first be exhibited as a central part of the company’s pavilion at the ONS energy convention in Stavanger (Opens August 25.) and later as a permanent installation in the company’s headquarters in Oslo.
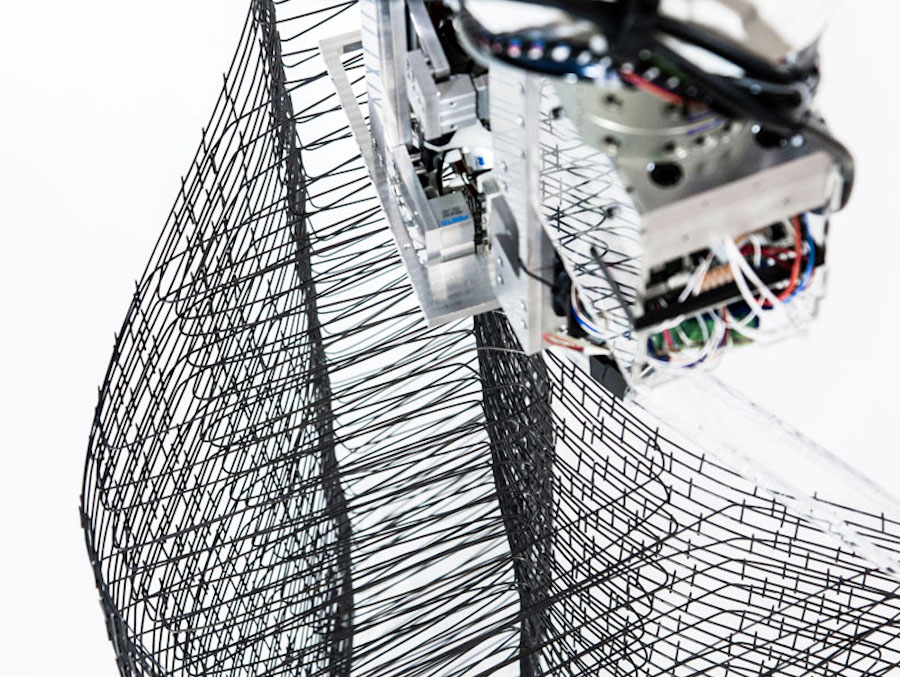
The installation draws inspiration from how the company’s geologists and geophysicist’s look at the world below sea level through detailed reconstructions of sub-surface landscapes created from seismic imaging and drill samples. An abstract representation of this landscape is created from a matrix of 529 acrylic pipes piercing the ceiling between the first and the second floor, creating organic rock-like formations on the first floor reflected as an ocean surface on the second.
Visitors are invited to interact with the installation by moving around in the space underneath it. The pipes that normally hang down to about an height of 1.3 meters above ground will be lifted up to create a protective dome around each person underneath the installation. The inverse effect of people’s movement creates wave like motions on the top floor. (Both floors will be accessible but the installation will be closed of by glass walls on the second floor).


Photo: Intek (left), Bjørn Gunnar Staal (right)
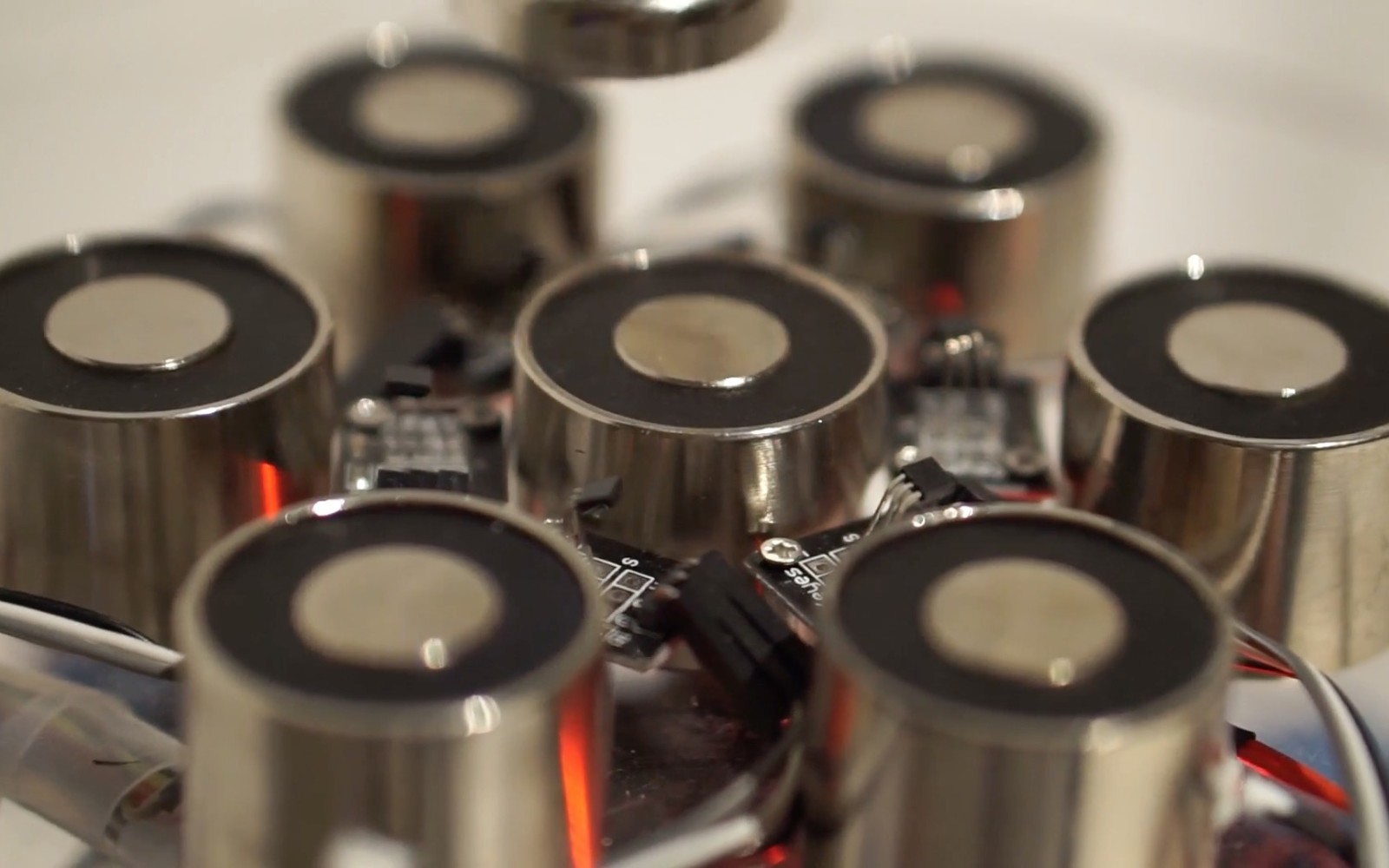
The installation consists of 23 by 23 custom made brackets designed to steer and drive the motion of each individual pipe. Each module is made up of a flexible stainless steel construction, housing an industrial servomotor (Beckhoff), one drive wheel, six supporting wheels and a capacitive sensor for position compensation every time a reference point inside the pipe passes through the bracket (You can see these thin metal rings in the centre of each pipe). All of these modules are mounted in rows of 23 with all of the electronics (EtherCAT terminals) mounted on the end of each row. These modules are then connected to the overall control system running on four industrial PCs. The mechanichal system is designed to be embedded in the floor between the two stories.
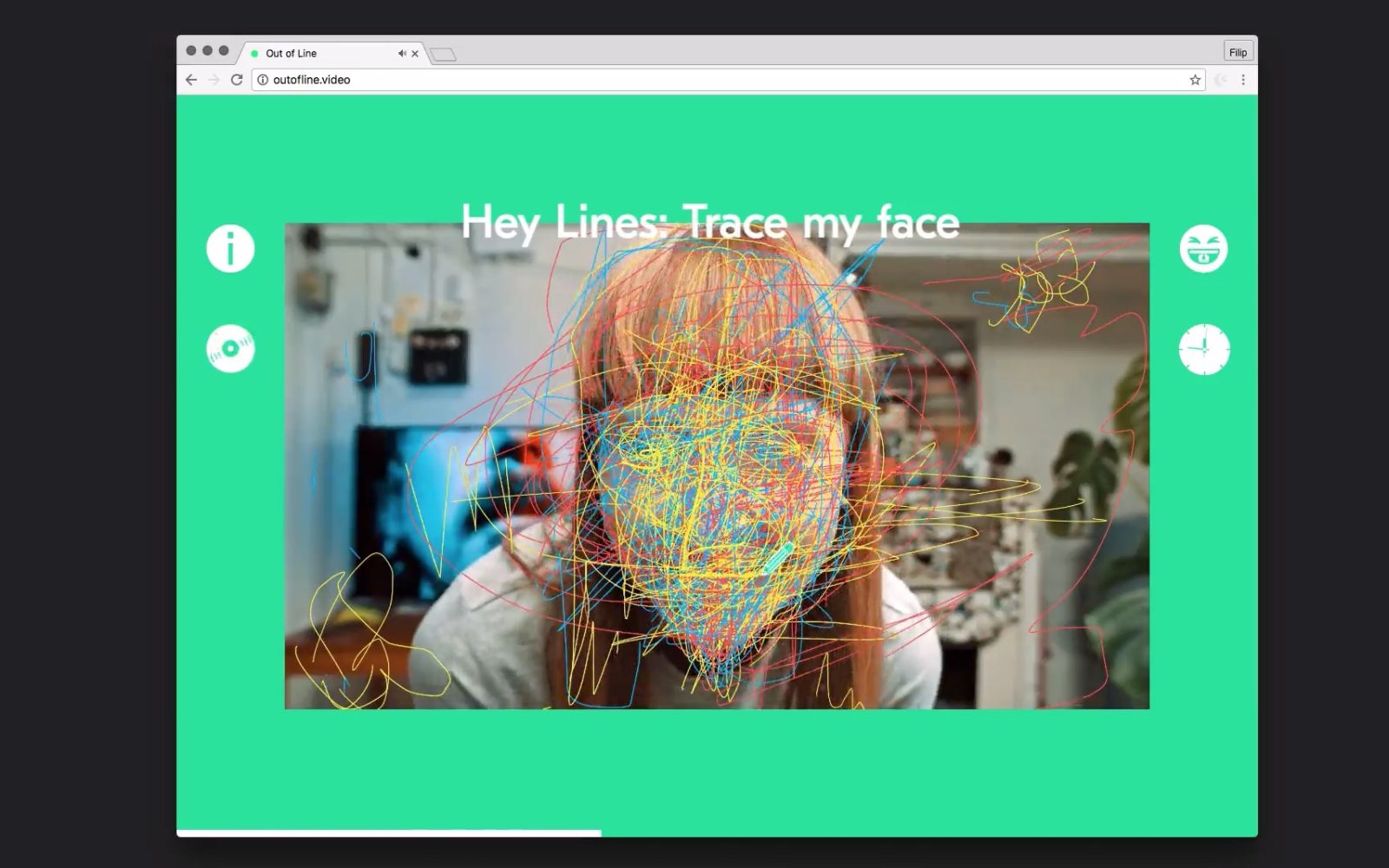
The control system consists three main parts; sensory layer, top level application layer and a PLC layer. The sensory layer is designed to deal with a demanding tracking situation in a tight space and the need for redundancy to ensure no blind spots. To achieve this there’s two overlapping levels of sensory data including a 60 sqm capacitive sensor floor beneath the wooden floor and four floor-mounted K4W


sensors.Photo: Michael Ray Vera Cruz Angeles
The top-level application is developed in openFrameworks. It is responsible for constructing a real time model of the environment based on data from the sensor floor and the Kinect sensors, generate a motion scheme based on this model and act as a UI for visualisation, calibration and monitoring of the system. This application communicates with four soft-PLCs responsible for controlling the servo-units. This app makes good use of a bunch of openFrameworks addons: ofxAssimpModelLoader, ofxUI, ofxKinectCommonBridge, ofxOpenCv. The team have also developed three new addons for this project that will be released as soon as they have time to clean up the code: ofxMultipleKinects (for displaying and aligning several kinect point clouds in the same coordinate space), ofxBeckhoffADS for data transfer between of and Beckhoff devices and ofxSensfloor for communication and visualization of sensfloor data in OF.
The final PLC Layer consists of four soft-PLCs built on Beckhoff’s TwinCat 3 platform: A top level PLC acting as a data transfer and synchronization layer between the openFrameworks app and three lower level PLCs each responsible for controlling one third of the servo-axes. These PLCs do most of the “heavy lifting” by continuously adjusting the velocity, acceleration and deceleration of each servo based on the set positions from the top-level application. In addition, these PLCs handle calibration, position compensation as well as velocity clamping and torque monitoring for collision detection.
In total, the installation is comprised of 529 servo motors + antistatic drive wheels, 3200 support wheels, 1.2 km of acrylic pipe, 1.5 km of cables, 21000 nuts and bolts and around 5 tonnes of stainless steel.
Scandinavian Design Group | Ctrl+N
Full Credits:
Frida Larsson (Scandinavian Design Group) – Project Management. (@fridalar)
Bjørn Gunnar Staal (Scandinavian Design Group) – Lead design, interaction, concept and software development. (@bgstaal)
James Fox (Abida) – Technichal Project Management, control engineering, mechanichal design. (@jamandfox)
Johnathon Little (Ctrl+n) – Architecture, Interior design. (@control_new)
Torbjørn Slettaløkken (Intek Engineering) – Mechanichal Construction.
Lars Westby (Intek Engineering) – Mechanichal Construction.
Sølvar Flatmo (Intek Engineering) – Electronics, Control System Architecture.
(Special thanks from the team to Josh Blake and Joshua Noble for helping out with the kinect windows SDK and to the support team at Beckhoff)