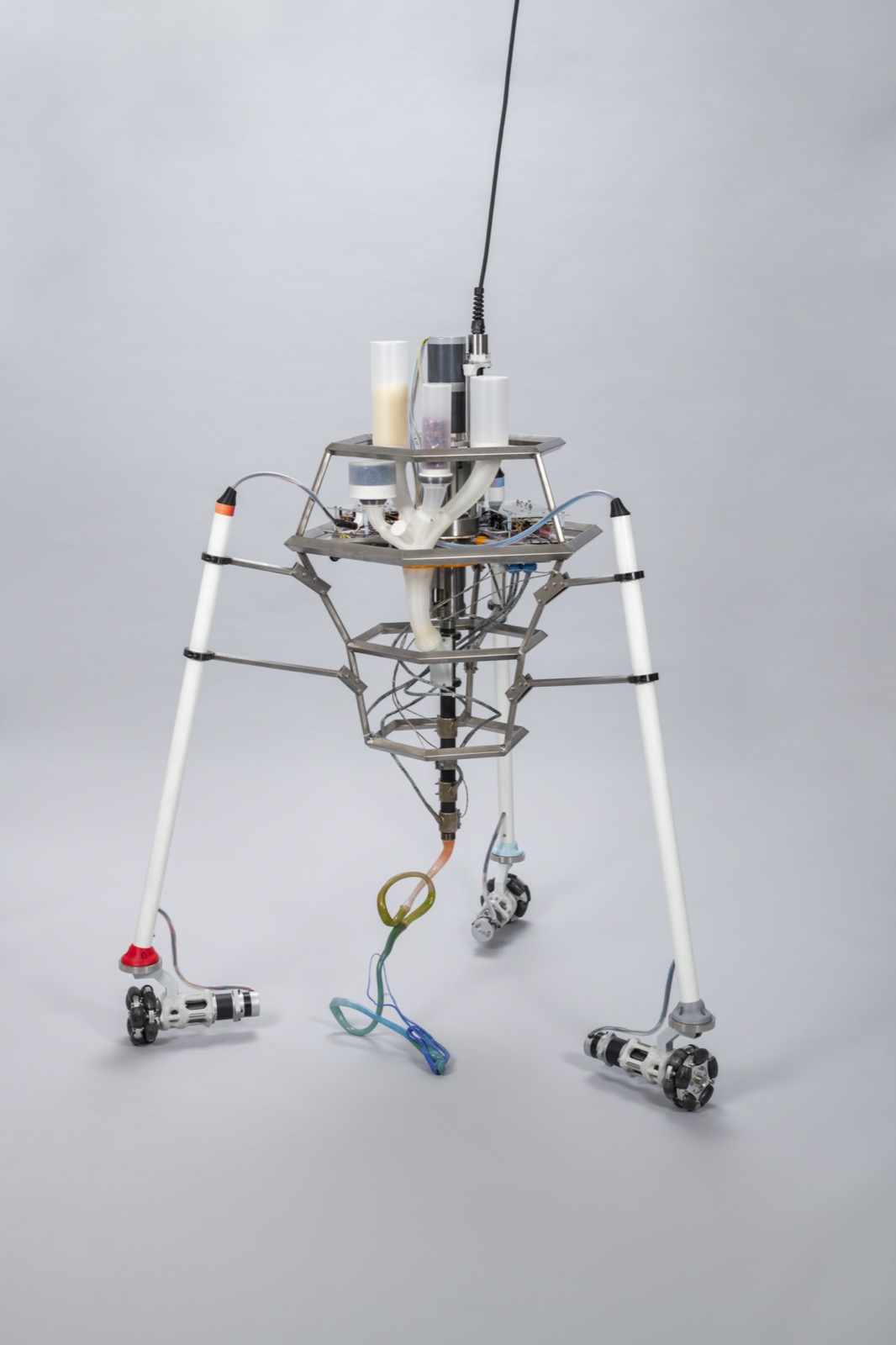
Created by Carolin Liebl and Nikolas Schmid-Pfähler (Liebl and Schmid-Pfähler), RE:PLACES, stands for ‘Recycling PLA Closed-Circuit Extrusion Shaper’ is a complex 1.70-meter-high robotic apparatus that excretes the plastic objects and then deposits them around the exhibition space like three-dimensional brushstrokes.
Resembling a three-legged planetary landing module, the apparatus, using a branched funnel system, transports differently colored granules made from plastic waste. The material is heated up and then compressed in a cylindrical extruder inside the robot, after which it’s finally squeezed out at the bottom as a viscous colored substance. The hot material bulges and twists until it cools down and solidifies into its final shape. In a creative process lasting several minutes, the 1.70-meter-high robot excretes the plastic objects and then deposits them around the exhibition space.
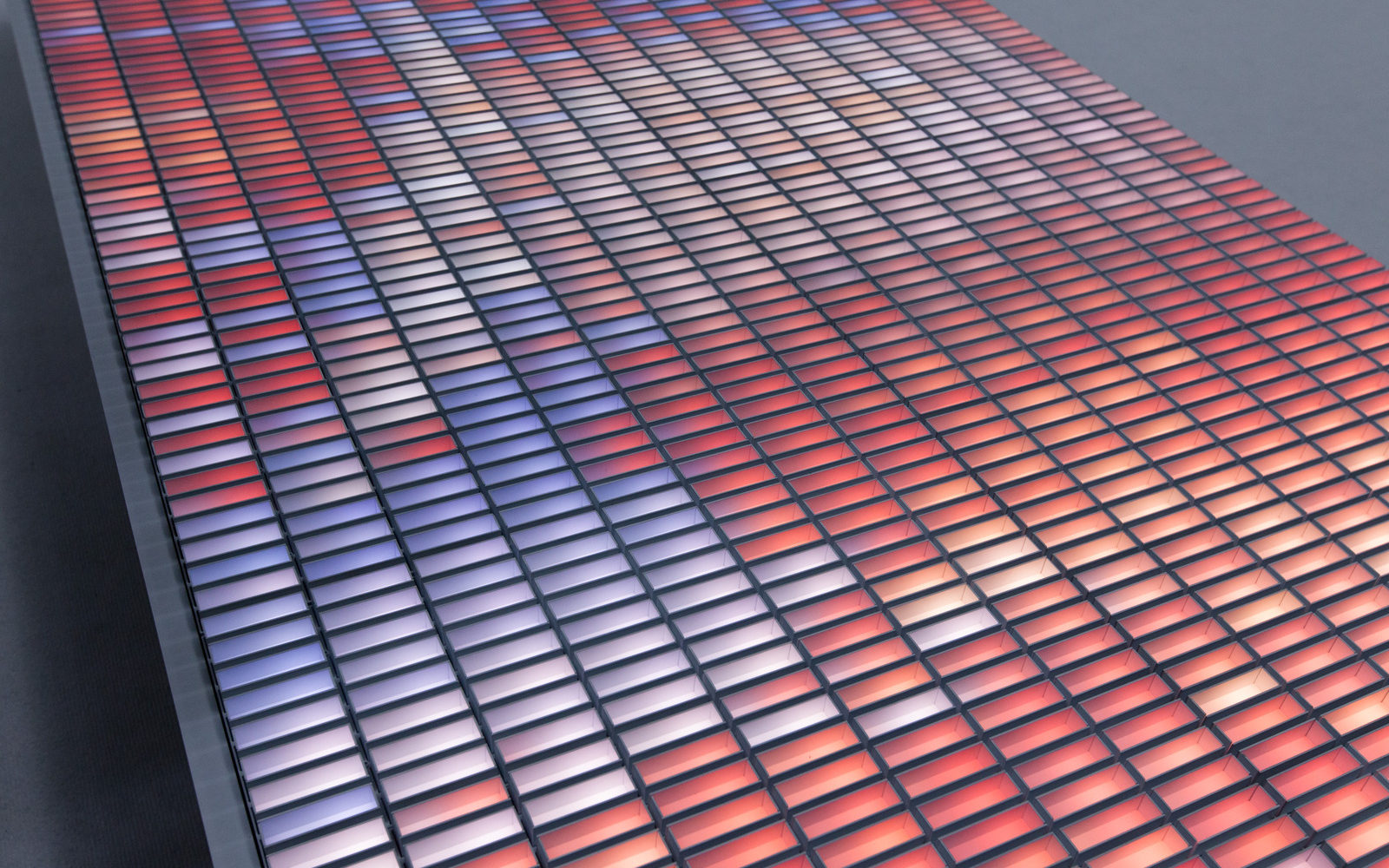
Colorful, formally expressive sculptures set the stage at the beginning of the performative installation. On closer inspection, the objects seem atypical for their particular material makeup—solid plastic forming multicolored abstract shapes with occasional bubbles on their surfaces. The compact, weighty pieces are made of various types of plastic that are the waste products of industrial production.
Liebl and Schmid-Pfähler
This creates a variety of intertwined forms with glassy surfaces and fascinating transitions in hue—material qualities not usually associated with plastic. The visual and haptic experience leads to an intuitive aesthetic approach to the thematic complex of plastic and the problems arising from its use. The objects created during an exhibition can serve again as raw material, thus completing the cycle.



The apparatus is a DIY plastic extruder after instructions from precious plastics. It is a self designed and built robot body made of stainless steel, fiberglass and 3D printed parts. It also uses a self shredded (PLA) plastic waste from 3D printing, stored in exchangeable containers on the robot. Comprised of a heat and distance sensors, 4x BLDC motors (one for the extruder, three for the robot-movement), 2 motorcontrollers from ODrive Robotics, 2x Teensy microcontrollers, 1x esp-32 and a sony playstation 4 controller for steering. Software includes arduino & python code for driving and temperature control.
Project Page | Liebl and Schmid-Pfähler