Created by Mathias Maierhofer and Valentina Soana at the Institute for Computational Design and Construction (ICD / University of Stuttgart), ‘Self-Choreographing Network’ is a project that aims to challenge the prevalent separation between (digital) design and (physical) operation processes of adaptive and interactive architectural systems.
The linearity of digital and physical processes implies both predetermined material and kinetic behaviours, limiting performances to those that are predictable and safe. This is particularly restricting with regard to compliant or flexible material systems, which exhibit significant kinetic and thus adaptive potential, but behave in ways that are difficult to fully predict in advance.
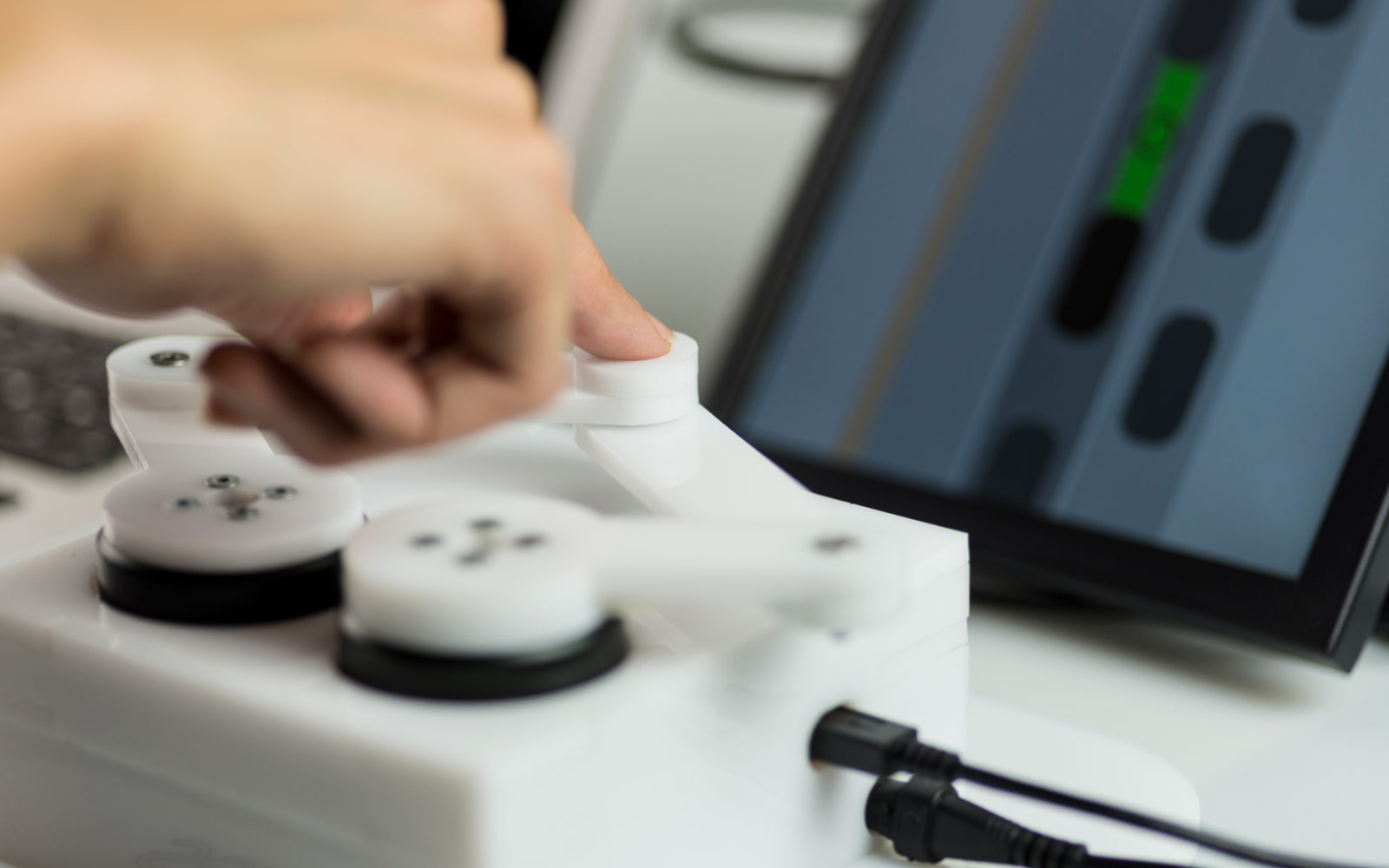
This project proposes a hybrid approach: a real-time, interactive design and operation process that enables the (material) system to be self-aware, fully utilizing and exploring its kinetic design space for adaptive purposes. The approach is based on the interaction of compliant materials with embedded robotic agents, at the interface between digital and physical. This is demonstrated in the form of a room-scale spatial architectural robot, comprising networks of linear elastic components augmented with robotic joints capable of sensing and two axis actuation.
Mathias Maierhofer and Valentina Soana
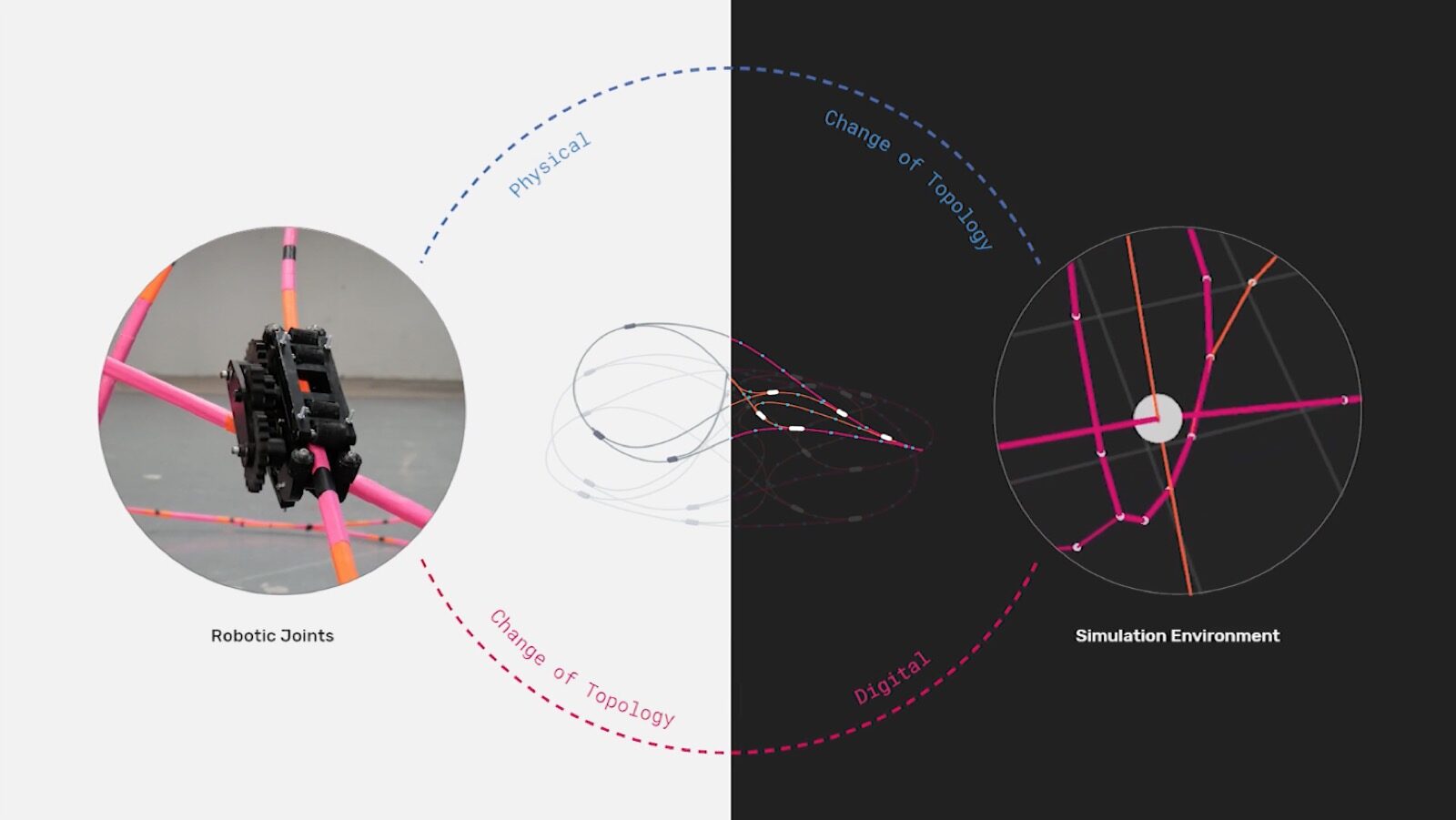


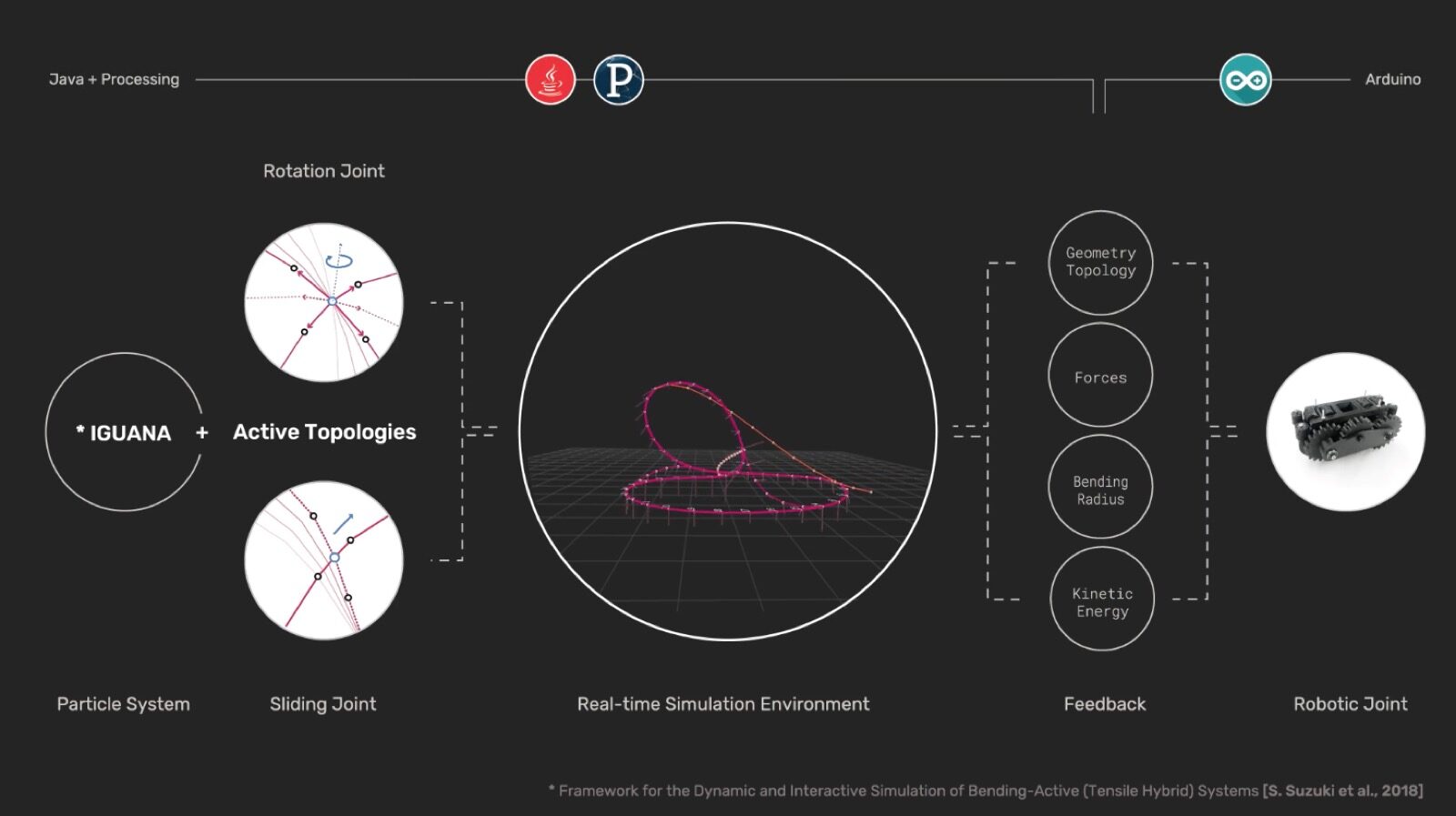
The system features both a physical instance and a corresponding digital twin that continuously augments physical performances based on Processing simulation feedback informed by Arduino controlled sensor data from the robotic joints. With this setup, spatial adaptation and reconfiguration can be designed in real-time, based on an open-ended and cyber-physical negotiation between numerical, robotic, material, and human behaviors, in the context of a physically deployed structure and its occupants.
Project Page | Mathias Maierhofer | Valentina Soana | ICD